Les capteurs de distances Comparatif ultrason / IR (infrarouge)
| Introduction : Comment mesurer une distance ? |
|
En robotique, on cherche toujours à avoir le maximum d’informations sur l’environnement afin de pouvoir adapter le comportement de ses chers petits robots. Il y a une information particulièrement intéressante à utiliser, c’est l’information de distance. Distance du robot par rapport à un mur, à un objet, au sol, etc … Le système le plus commun utilisé en robotique était le système de télémètre à ultrasons. Mais on trouve maintenant des systèmes totalement infrarouges, des capteurs SHARP comme le GP2D12 qui présentent de nombreux avantages. Définition du mot « Capteur » : Un capteur est un organe de prélèvement d’information qui élabore à partir d’une grandeur physique, une autre grandeur physique de nature différente. Cette grandeur représentative de la grandeur prélevée est utilisable à des fins de mesure ou de commande. |
| Capteur à ultra son | Capteur IR ( infrarouge) |
 |
 |
|
Le principe |
|
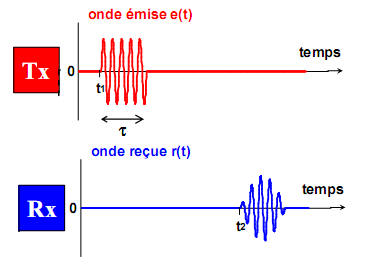
Les télémètres à ultrasons fonctionnent en mesurant le temps de retour d’une onde sonore inaudible émise par le capteur. La vitesse du son dans l’air étant à peu près stable, on en déduit la distance de l’obstacle. |
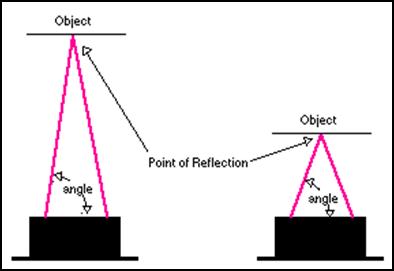
Le capteur SHARP fonctionne en mesurant l’angle de réflexion d’une émission d’IR modulée, grâce à une rangée de récepteur. |
|
|
 |
|
La portée |
|
| On peut faire des mesures de 15cm à 11m. | La portée officielle est de 10 à 80cm. |
|
La directivité |
|
| Les ultrasons sont très évasifs. Ce qui peut être un gros avantage (détection d’obstacle rapprochée sur une large couronne) ou un gros inconvénient (détection des murs d’un couloir et non du fond du couloir). | La directivité est bien meilleure (cône de 5°). Pour faire mieux, il faut ensuite passer à des télémètres laser beaucoup plus chers ! |
|
La précision |
|
| La précision des ultrasons dépend de la mesure précise du temps de parcours de l’onde sonore. Ce dernier peut aussi varier suivant les conditions de température, de pression … Précision annoncée sur le système Polaroïd : 1%. |
La précision du capteur dépend de la distance (simple conséquence trigonométrique). Excellente à 10 cm, elle régresse de plus en plus jusqu’au 80cm. Le capteur a visiblement besoin d’un étalonnage, et je n’ai pas le matériel pour en faire un précis. Mais on peut compter néanmoins je pense sur 1cm de précision, au moins de près. |
|
La taille |
|
| Les transducteurs ultrasons peuvent être assez petits. Mais les cartes réalisant la télémesure comme pour le système Polaroïd prennent de la place. | La taille est absolument minuscule (cf photo). Rien d’autre n’est nécessaire. |
|
La consommation |
|
| 100 mA en veille et 2A en émission pour la carte Polaroïd ! | Seulement 25 mA ! En continu pour le modèle analogique, ou à chaque demande de mesure pour le modèle « série ». |
|
Le prix |
|
| Un système ultrasons Polaroïd coûte dans les 40€, auquel il faut ajouter un transducteur, dans les 15€. | Compteur seulement dans les 15€ pour un système IR analogique ! |
|
Sensibilité aux interférences et aux autres capteurs |
|
| On l’a vu plus haut, les capteurs ultrasons sont sensibles à la température et à la pression. Mais il y a plus grave : Ils sont aussi sensibles aux autres appareils utilisant les mêmes fréquences, comme les télé-objectifs à ultrasons, ou tout simplement les autres robots ! |
Ces capteur IR ont une modulation qui les affranchissent normalement de l’éclairage ambiant. Vous ne devriez donc pas avoir de problème de ce coté là. Selon les tests, si le capteur se prend une lampe directement dessus il aime pas trop… mais sinon je n’ai pas eu de problèmes. Par contre, si on les met face à face et très près, la on revient dans le cas d’un éclairage direct, et les mesures ne sont plus bonnes. |
|
Conclusion |
|
| Évidemment, les deux systèmes ont leurs avantages et leurs inconvénients, et si la distance est une information qui vous intéresse il va falloir choisir entre les deux. Ceci dit, on peut distinguer 5 cas :
D’une manière générale, on conseille plutôt le capteur IR, surtout pour les problèmes de brouillage ! |
|