| |
Centre d’intérêt 4 : Etude et programmation d’une tondeuse |
|
|
Situation problème M. Garraud doit tondre sa pelouse mais il a vu à la télévision que des robots tondeuses étaient maintenant en vente. Mais comment assurer l’évolution de la tondeuse sur toute la surface engazonnée, en un temps raisonnable (avant repousse) et quel que soit l’aménagement de ladite surface ?
|
||
| Séquences / Activités | Ressources**Si nécessaire, (uniquement chez vous), vous avez la possibilité de télécharger un lecteur de fichier swf ici : |
Compétences travaillées Rattachement au socle |
||||||
Activité 1
Pour aller plus loin : Réaliser maintenant le programme 3 avec le logiciel scratch, en utilisant le terrain et la tondeuse mis à votre disposition sur le réseau (répertoire « groupes », « classe », « données », « technologie » et en partant des hypothèses suivantes :
– Placer le robot en position initiale lame levée,
– Placer la lame en position tonte (stylo en position d’écriture),
– Programmer les déplacements pour que le robot tonde le périmètre du terrain afin d’obtenir une finition de qualité. Réinitialiser la tonte : – Programmer l’effacement des traits afin de pouvoir recommencer une simulation du programme. (En appuyant sur la barre d’espace par exemple)
|
Présentation robot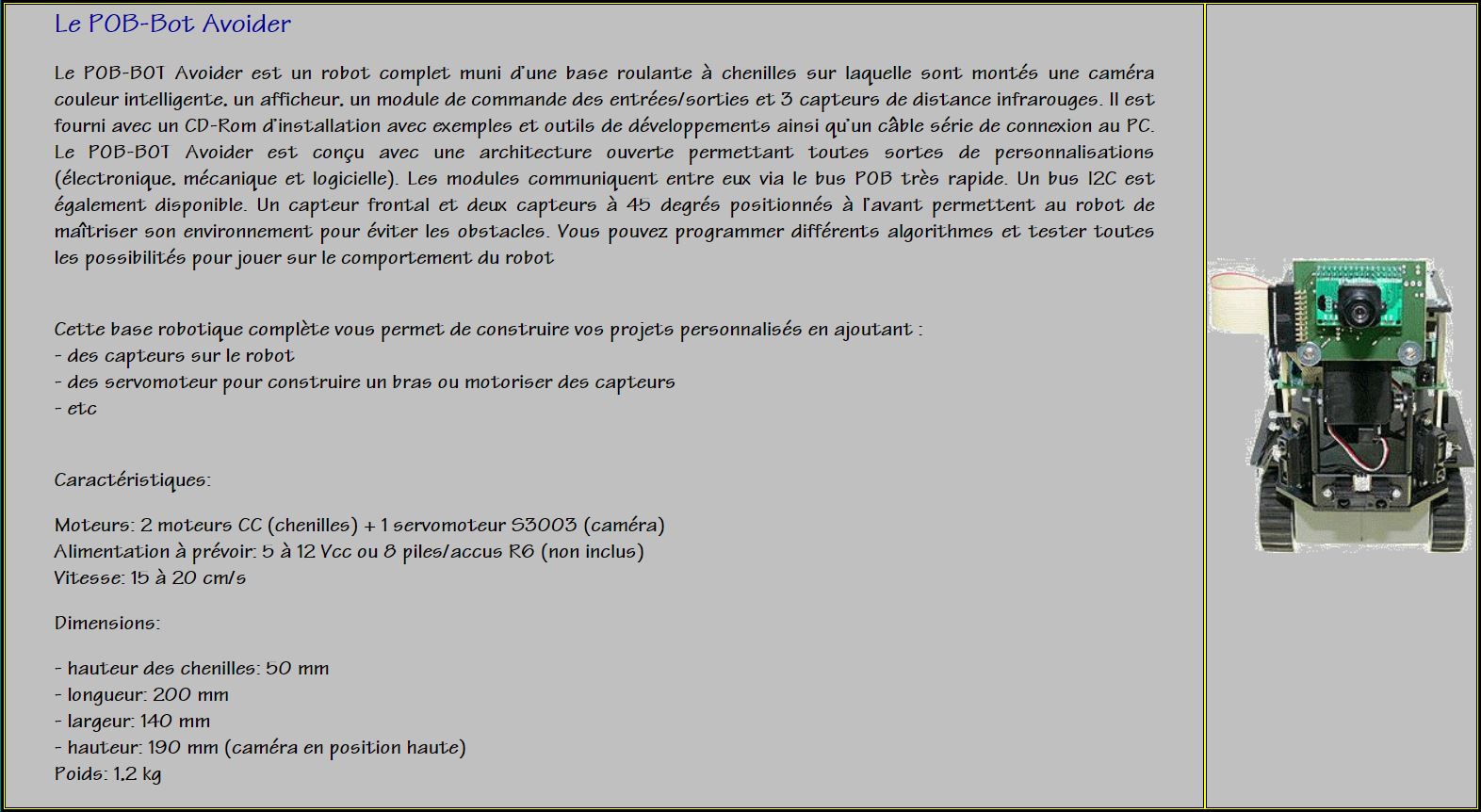 Planche d’icones à utiliser dans le logiciel Publisher ou Draw pour rédiger vos programmes (n’oubliez pas de préciser les valeurs lorsque cela est nécessaire).  Présentation Risbee
Présentation Risbee
|
Imaginer des solutions en réponse aux besoins, matérialiser une idée en intégrant une dimension design
Analyser le fonctionnement et la structure d’un objet
L’informatique et la programmation
|
||||||
|
Synthèse Structuration |
||||||||
|
Étude de l’organisation fonctionnelle Activité 2 De quel bloc est-elle composée ? Quels sont les composants associés ? |
Organisation fonctionnelle Définitions  |
|||||||
|
Synthèse Structuration |
||||||||
| Etude des capteurs de distance: Activité 3 Quels sont les dispositifs d’acquisition présents ? Quelle est la nature des informations ? |
|
|||||||
|
Synthèse Structuration Modélisation Evolution OT |
||||||||
| Activité 4
Le problème : Il nous faut trouver un moyen efficace pour nettoyer les sols de la maison sans fournir trop d’efforts. Comment nettoyer les sols ? – Quels sont les objets techniques inventés par l’Homme pour nettoyer les sols ? – Quels types de sols permettent-ils de nettoyer ? Travail à Réaliser : Après avoir observé le robot en fonctionnement, avoir étudié attentivement les divers documents disponibles en ressources.
Vous expliquerez en détail et illustrerez leur fonctionnement. Vous rédigerez votre travail sous forme numérique en utilisant le logiciel de votre choix, attention à utiliser un logiciel (du réseau) approprié à une présentation numérique. N’oubliez pas de citer vos sources d’information. Vous présenterez votre travail achevé au reste de la classe avec le vidéoprojecteur et le tableau interactif. |
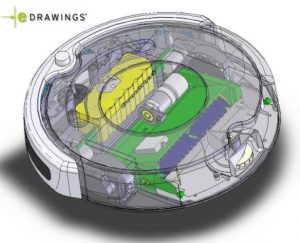
Présentation ASPIROBOT
Aspirobot Edrawing
Plaquette Aspirobot
Schéma fonctionnel aspirateur autonome
Certaines ressources utilisée ici proviennent du site de NicolasTourreau du clg Leclerc de l’Académie de Toulouse |
|||||||
|
Synthèses Structuration
|
||||||||